{kind=link}
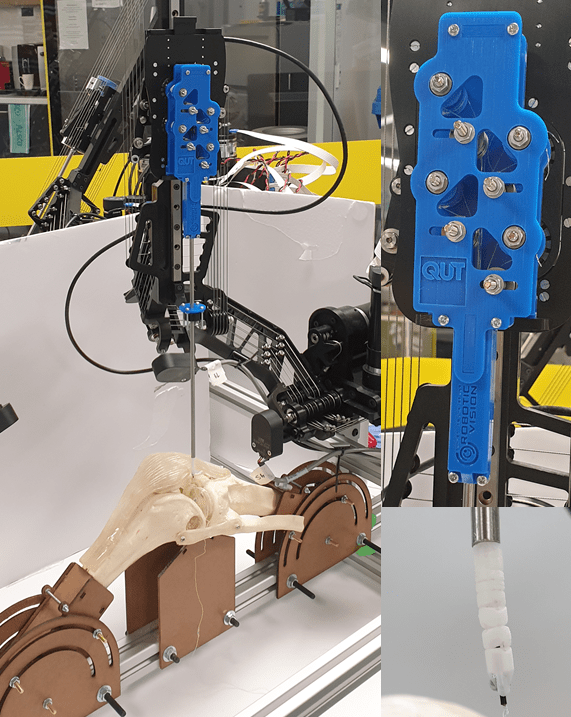
Snakeraven is a robot that attaches to the Raven II surgical robotic platform. The snake-like manipulator is patient-specific, and it can be designed for any anatomy. A computer optimises the design parameters of SnakeRaven in terms of how well it reaches and orients about the targets in a patient scan. This model is now a 3D printed tool for the Raven II designed to reach four targets inside a knee phantom.
Lead Researcher: Andrew Razjigaev