{kind=link}
An AI Research Platform for Reinforcement Learning from Real Panoramic Images. the Matterport3D Simulator enables development of AI agents that interact with real 3D environments using visual information (RGB-D images). It is primarily intended for research in deep reinforcement learning, at the intersection of computer vision, natural language processing and robotics.
Matterport3D Simulator is based on densely sampled 360-degree indoor RGB-D images from the Matterport3D dataset. The dataset consists of 90 different indoor environments, including homes, offices, churches and hotels. Each environment contains full 360-degree RGB-D scans from between 8 and 349 viewpoints, spread on average 2.25m apart throughout the entire walkable floorplan of the scene.
Actions
At each viewpoint location, the agent can pan and elevate the camera. The agent can also choose to move between viewpoints.
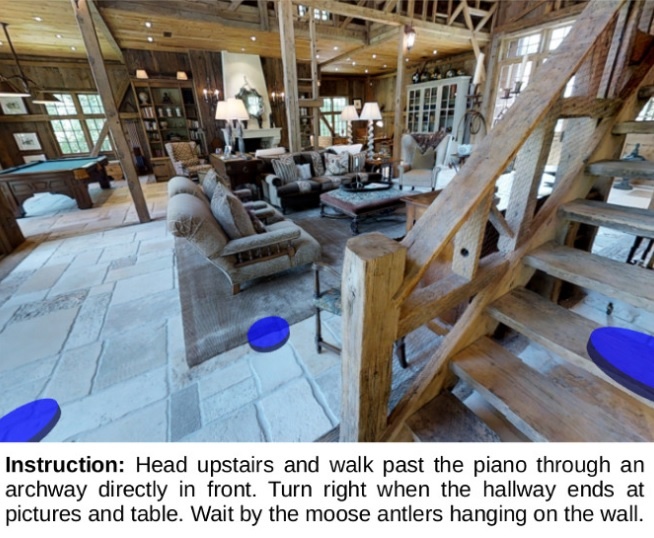
Room-to-Room (R2R) Navigation Task
The simulator includes the training data and evaluation metrics for the Room-to-Room (R2R) Navigation task, which requires an autonomous agent to follow a natural language navigation instruction to navigate to a goal location in a previously unseen building.