{kind=link}
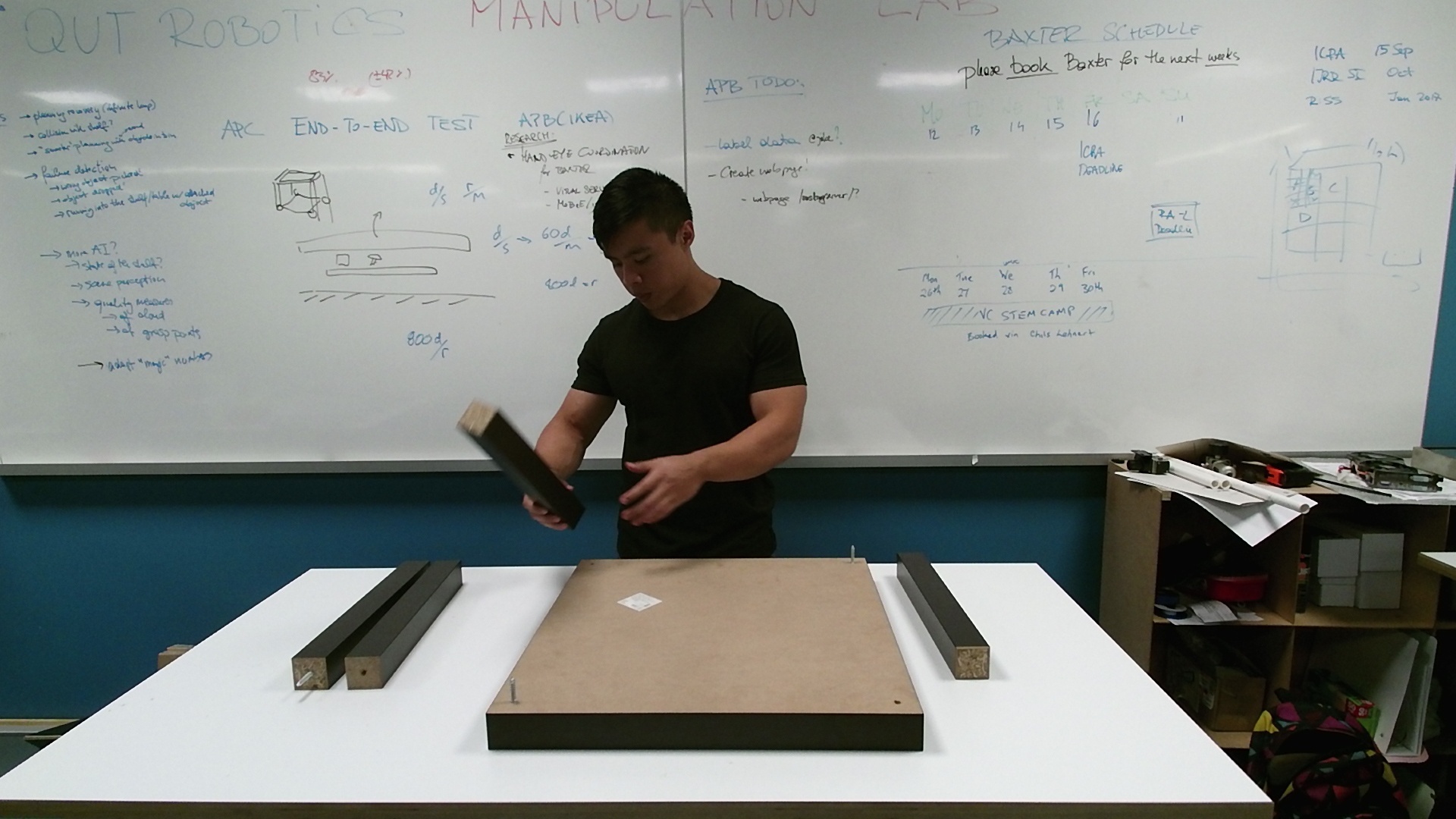
The purpose of this project is to showcase some of the science developed in the Centre’s Robots, Humans and Action Project and the Manipulation and Vision Project via a tangible task that involves human-robot cooperation. Specifically, demonstrating a robot assisting a human in the task of assembling a piece of Ikea furniture.
The key pieces of science being demonstrated are:
- Activity recognition and forecasting: A perception system recognises when a human subject assembling a piece of furniture is (1) ready to start the assembly, (2) ready for the next part for assembly, and (3) completed assembly.
- Robot manipulation: A robot arm picks up parts and passes them over to the human or places them on a work surface.
- Robot-human hand-over: The handover of parts from robot to human follows a natural trajectory with the robot releasing the part in the same way a human would (i.e., pre-empting the need for force applied by the human receiver before releasing). This is the riskiest component of the demonstration and is the subject of ongoing research.
Check out the “behind the scenes blog post I wrote on the creation of the dataset and the paper that goes along with it:
http://www.itzikbs.com/the-story-behind-the-ikea-assembly-dataset-paper
Great blog Itzik, and some nice memories! I think it’s really important to talk about the challenges of research as well as the glossy final products.