Meet our Robots

Centre researchers and engineers have developed new and more advanced technologies that enable robots to see, understand and adapt to complex, unstructured and dynamically challenging environments as humans do.
The Centre creates robots to solve some of the world’s most significant challenges. This has been done through the creation of bespoke robots, built from the ground up, by our talented researchers and engineers. In other instances our researchers create new software that can be used on existing robotic platforms to enhance existing functionality and capability.
Centre-developed Robots
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Larvalbot
Larvalbot is an underwater robot platform that has greatly accelerated efforts to re-seed old corals with healthy new polyps.
COTSbot
COTSbot is a robot designed to seek out and control the Great Barrier Reef’s crown-of-thorns starfish (COTS), which are responsible for an estimated 40% of the reef’s total decline in coral cover.
RangerBot
RangerBot significantly extends the capabilities of its predecessor, the COTSbot, and exploits real-time on-board vision for navigation, obstacle detection, survey and management tasks.
Agbot II
Agbot II is a robot equipped with cameras, sensors and software and is designed to work in autonomous groups to navigate, detect and classify weeds and manage them either chemically or mechanically as well as apply fertilizer for site specific crop management.
Harvey
Harvey, the robotic capsicum harvester, is an horticultural robot prototype designed to identify and harvest capsicums.
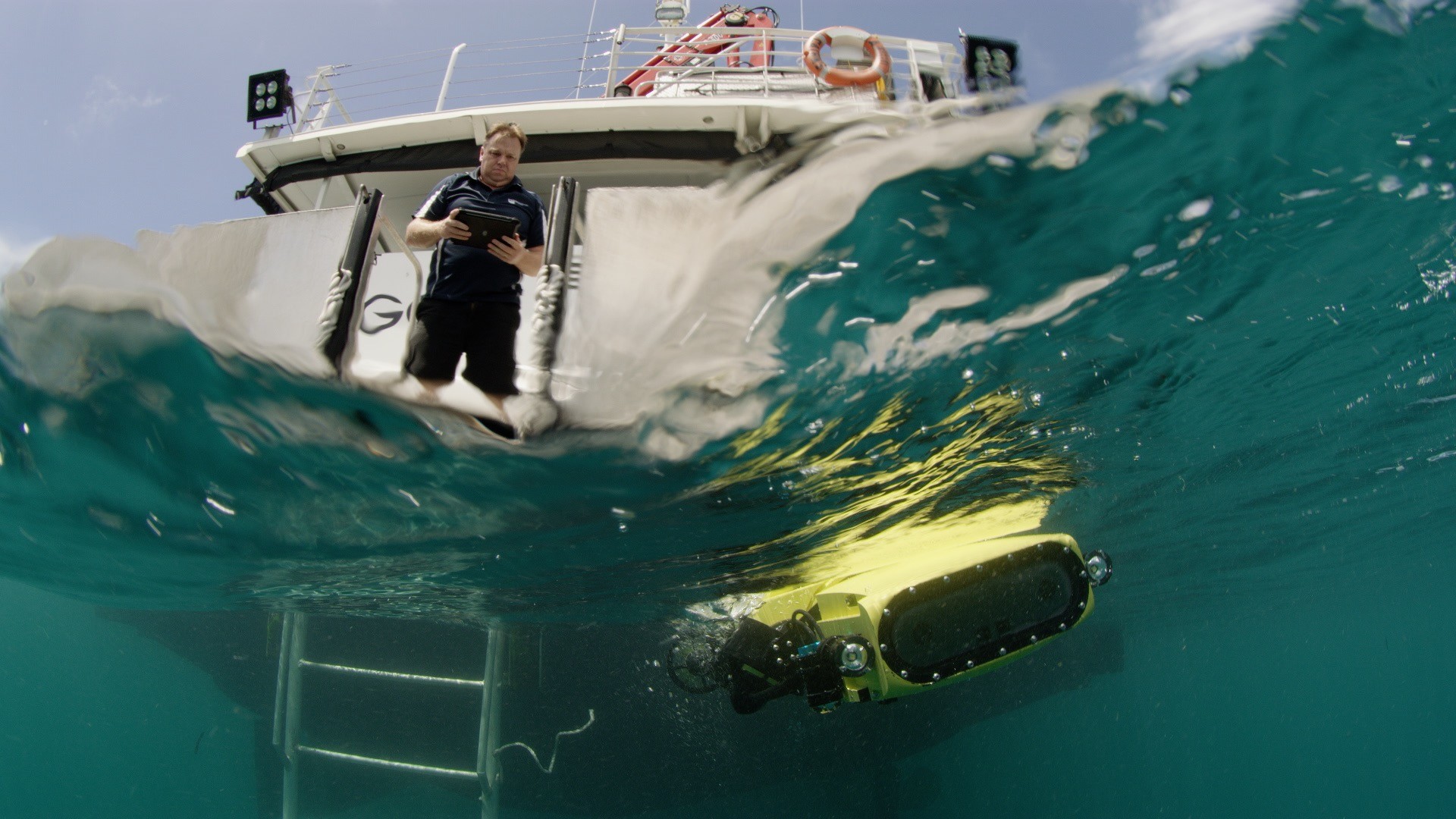
Bruce
Bruce is an autonomous and versatile robo-boat with a range of emergency response and environmental management applications.
Carlie
Carlie is a scaled down version of a full-size autonomous car, with a range of camera sensors and significant on-board computer capability.
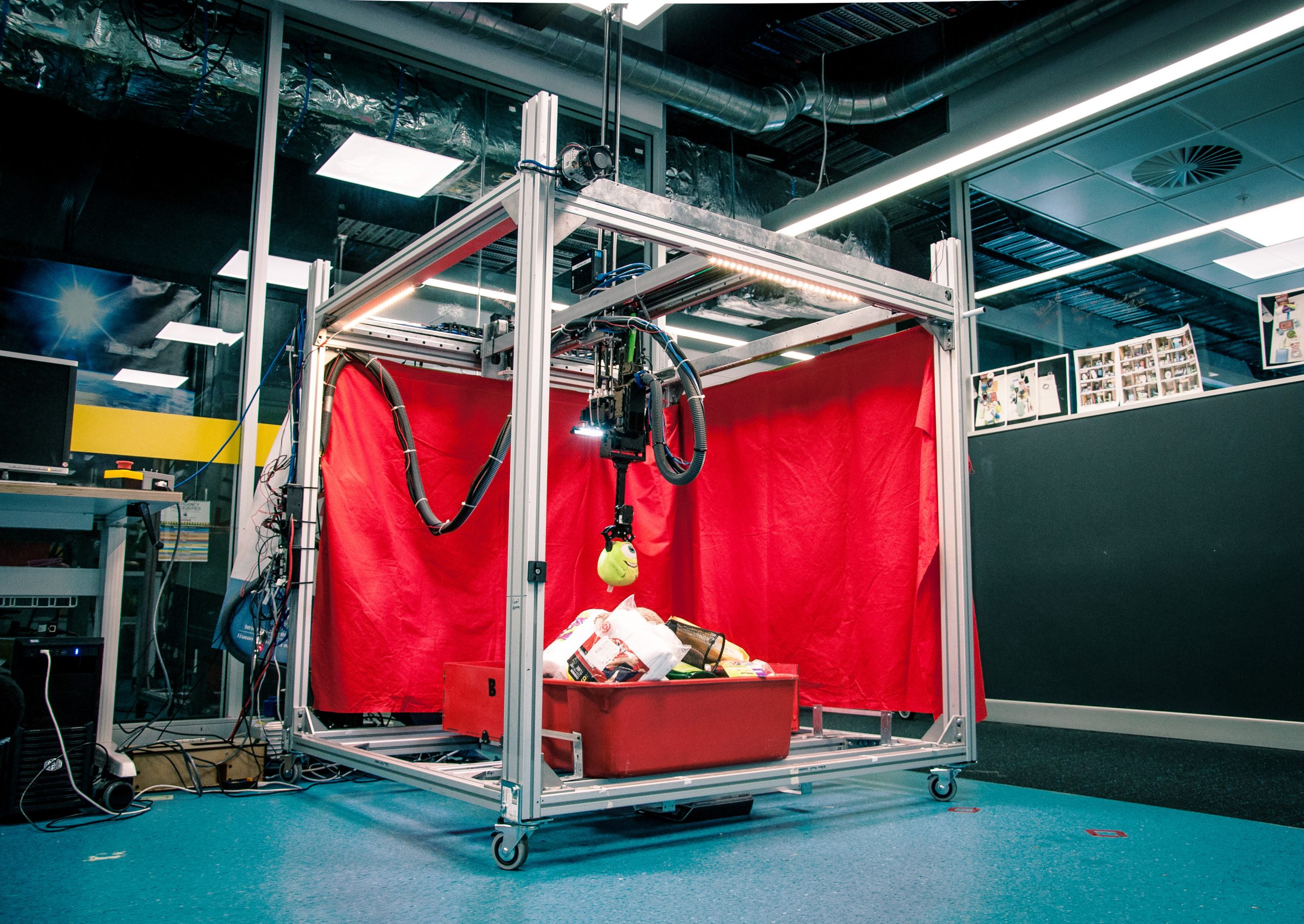
Cartman
Cartman is a Cartesian robot that won the 2017 Amazon Robotics Challenge. It moves along three axes at right angles to each other, like a gantry crane, and features a rotating gripper that allows it to pick up items using either suction or a simple two-finger grip.
Penguin Pi
A small mobile robot the Penguin Pi couples a proven mobility platform with a Rasberry Pi and software resources.
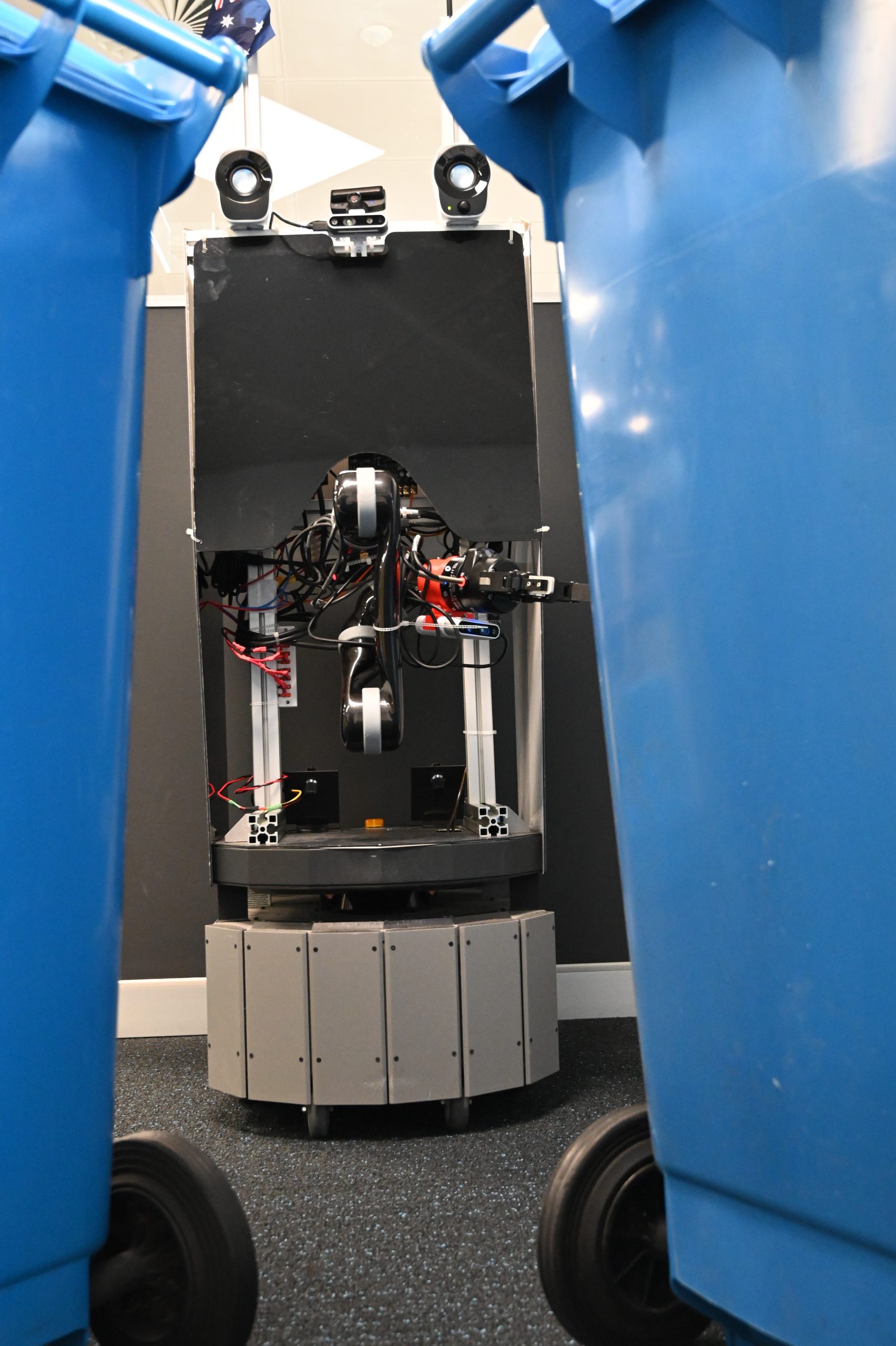
Rocky
Rocky is a service and assistive robot that combines mobility with an arm, and was built to support a range of domestic tasks.
Franky
Franky is a more capable version of Rocky, that combines a high-performance mobile base with a 7-axis robot arm capable of compliant motion.
Snakebot
Snakebot has seen surgeons and roboticists join forces to explore how autonomous and semi-autonomous robots could be used in surgery, using keyhole surgery in the knee as a way to explore the technology.
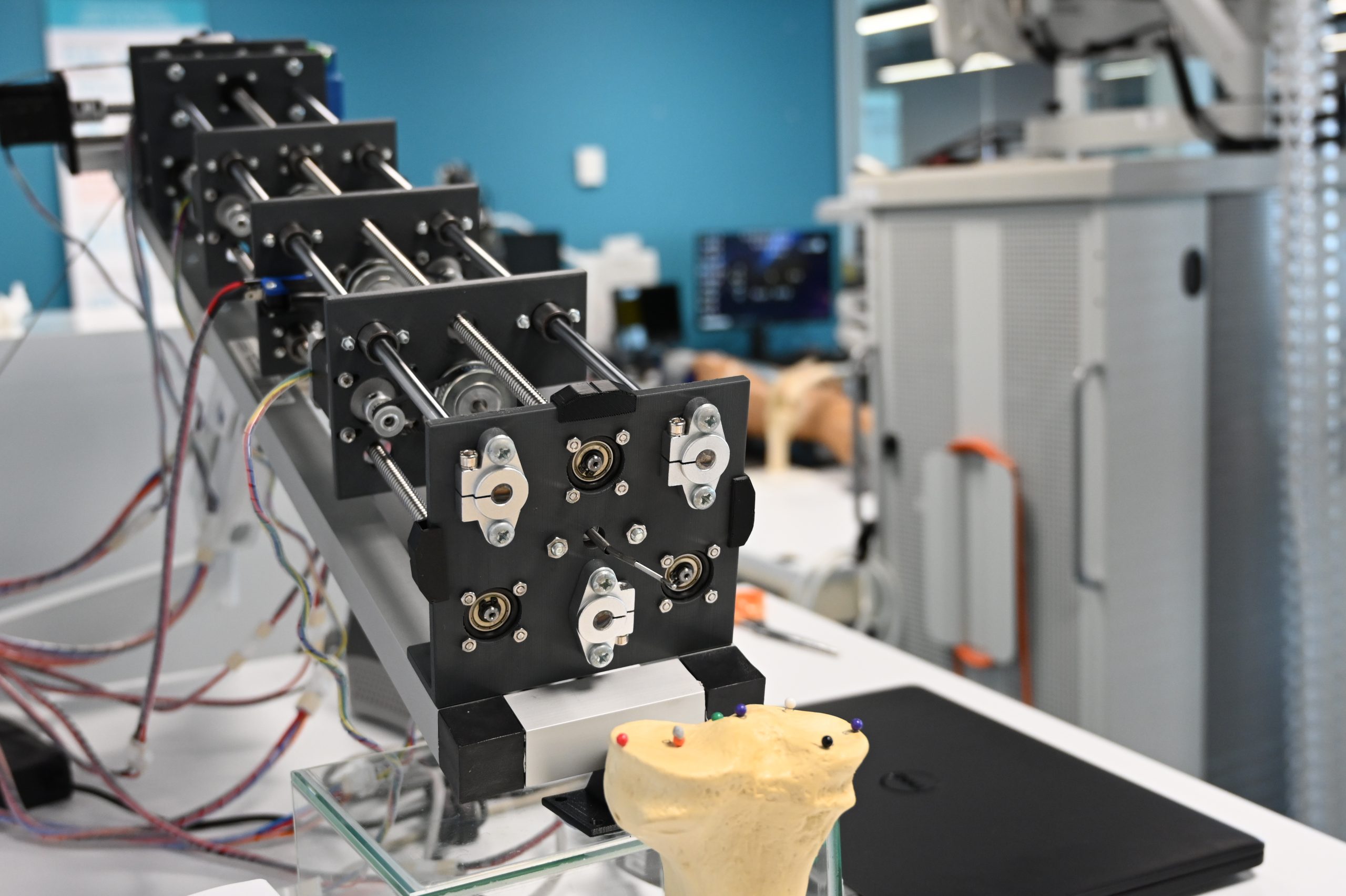
Snakeraven
Snakeraven is a robot that attaches to the Raven II surgical robotic platform. This Snake-like manipulator is patient-specific and it can be designed for any anatomy.
Off-the-shelf Robots
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pepper – SoftBank Robotics’ humanoid robot
Pepper was the subject of a research project to equip it with a vision-based indoor navigation capability. It was also used to test a number of applications designed to explore robot-delivered healthcare services; such as delivering routine healthcare information to patients or taking a brief heal-related assessment.
Franka-Emika Panda Robot, Kinova Mico, Universal Robots UR5 and UR10 Omron LD-60
These robots have been used in our manipulation research which is focused on enabling a robot to manipulate objects in a robust manner without having access to detailed prior 3D models of those objects. Instead, the robot uses vision-guided reaching, vision-guided grasping and task-informed manipulation to interact with every-day objects or to exchange objects with people.
Baxter
A two-armed light-industrial robot with vision capability, was used to support research into vision-based reinforcement learning for object manipulation.
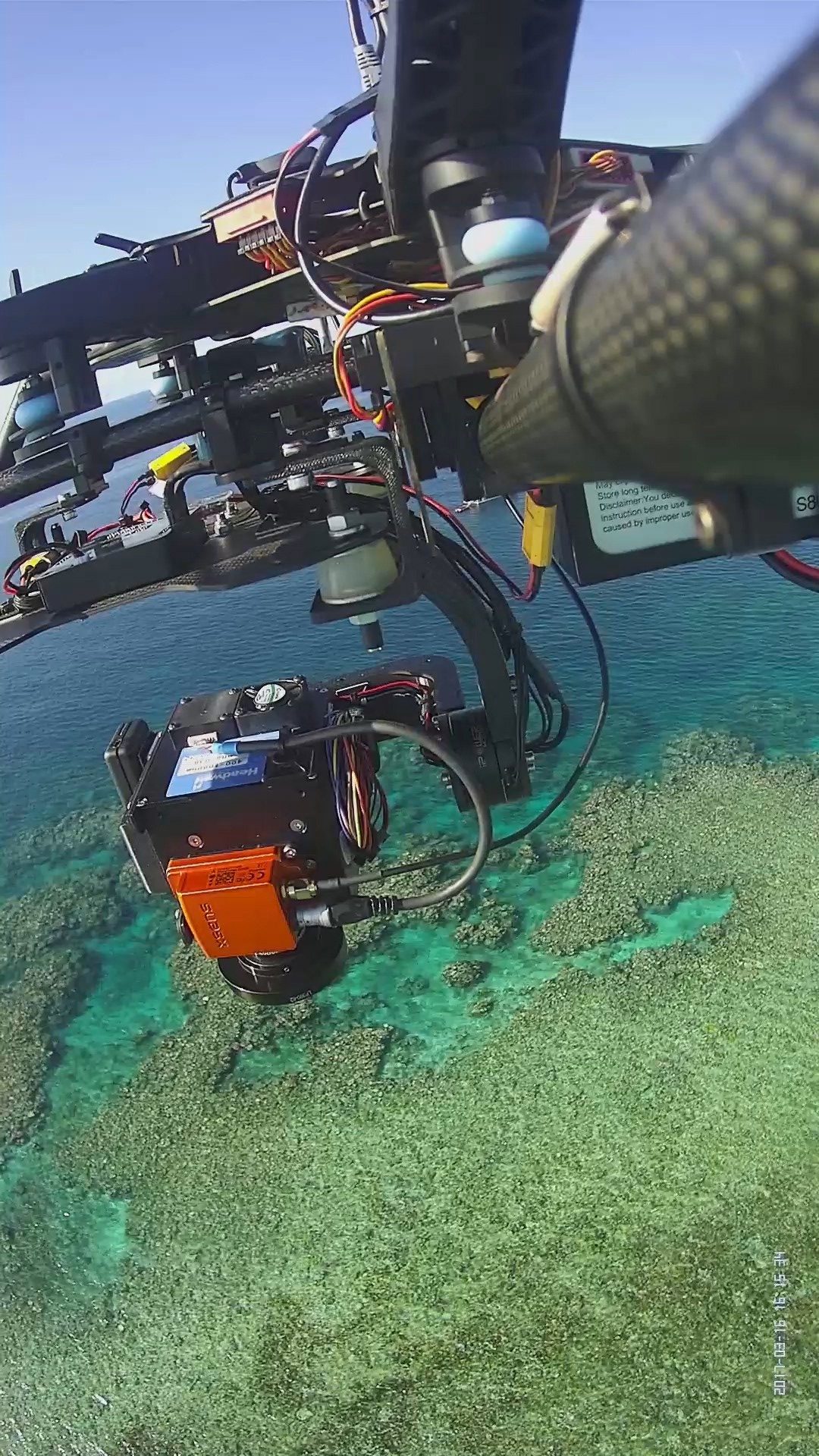
UAVs
A range of UAV’s have been developed with vision sensors and then deployed into GPS denied environments, to enable research in spatial ecology, air quality sampling, path planning and navigation.